
Summary
Since this is the first post, this update will also contain a short summary of the project. Roughly 2 weeks ago, i decided i wanted to build a robot from Gods Unchained. This is something i used to do for fun, though, previously i had to stop building them due to time constraints.

The original plan was to build a glorified RC car, with a camera, self-balancing, and an android controller. However, with the ability, and expressed interest from outside parties in bidding for the robot. It's overall design evolved from an RC car, to a more "alive" design using a series of AI models to govern it's actions.
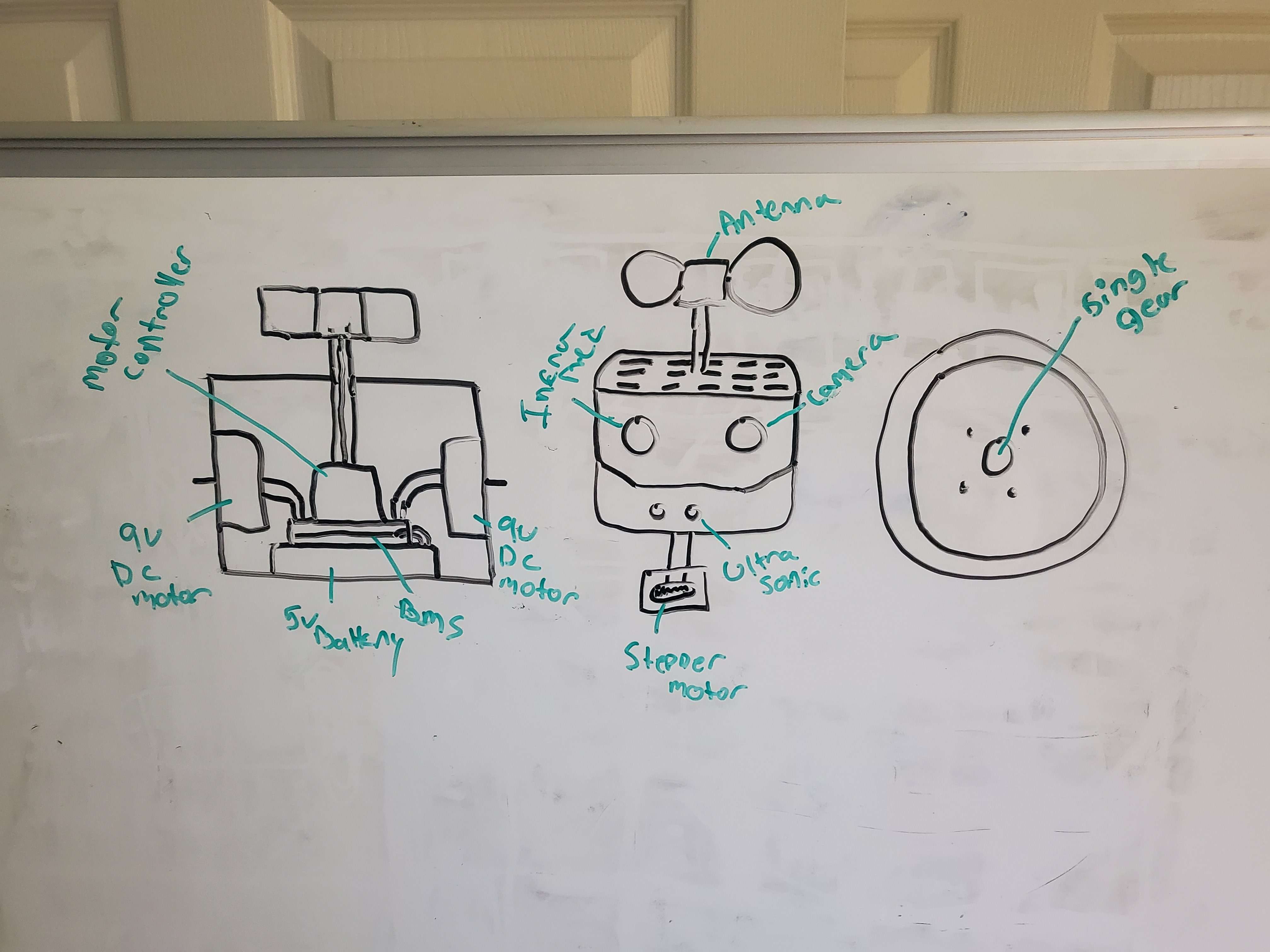
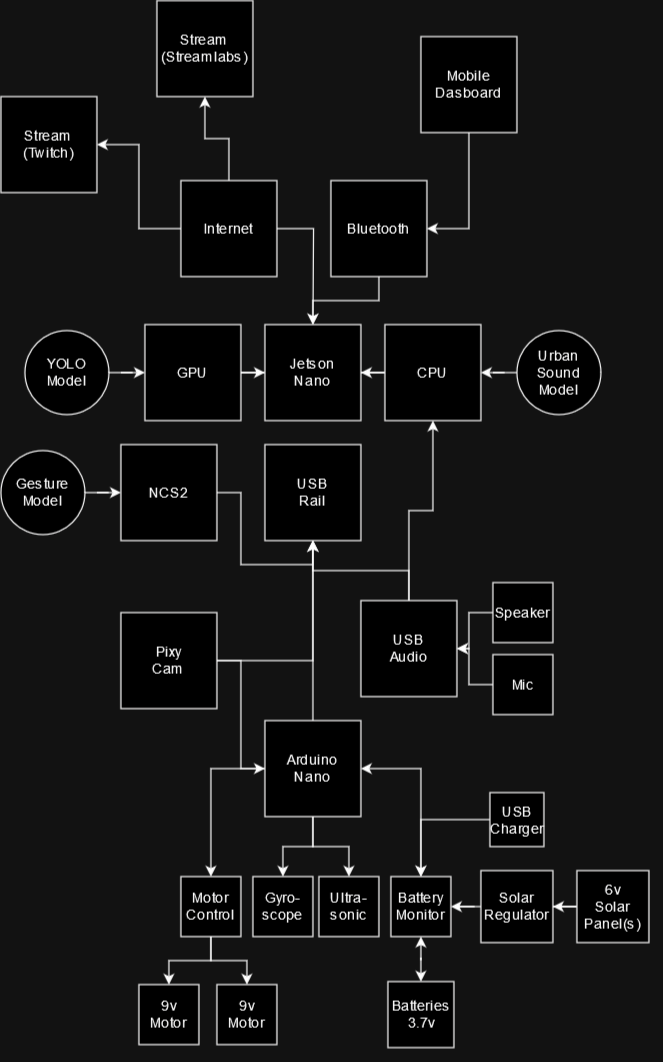
The current plan is to use an Nvidia Jetson Nano, potentially combined with an Intel Neural Compute Stick 2 to provide enough computing power to run YOLO, Urban Sound, and Gesture models in real time. Will also be adding a speaker, a mic, and some small 6v solar panels on the top of the robot.
Updates
Jetson nano base image has been updated to support the intel ncs2, was erroring on boot without first unplugging the ncs2. However a hotplug change seemed to resolve this! Now works rebooting without any issues.
New hardware showed up this week!
- Raspberry PI 5
Decided not to use this over the Jetson Nano, mostly due to power draw concerns. We want to keep the power draw as low as we can for battery life, and the PI 5 can draw up to 3 amps more than the Jetson Nano at full load. - USB Audio Dongle
This is a simple dongle from Amazon by Adafruit. No issues, or quality problems with it. - Olympus ME-52W Microphone
This is a microphone designed for recording audio in a room, it's often used in Olympus audio recorders which are common in corporate, and government environments due to there quality.
- Raspberry PI 5
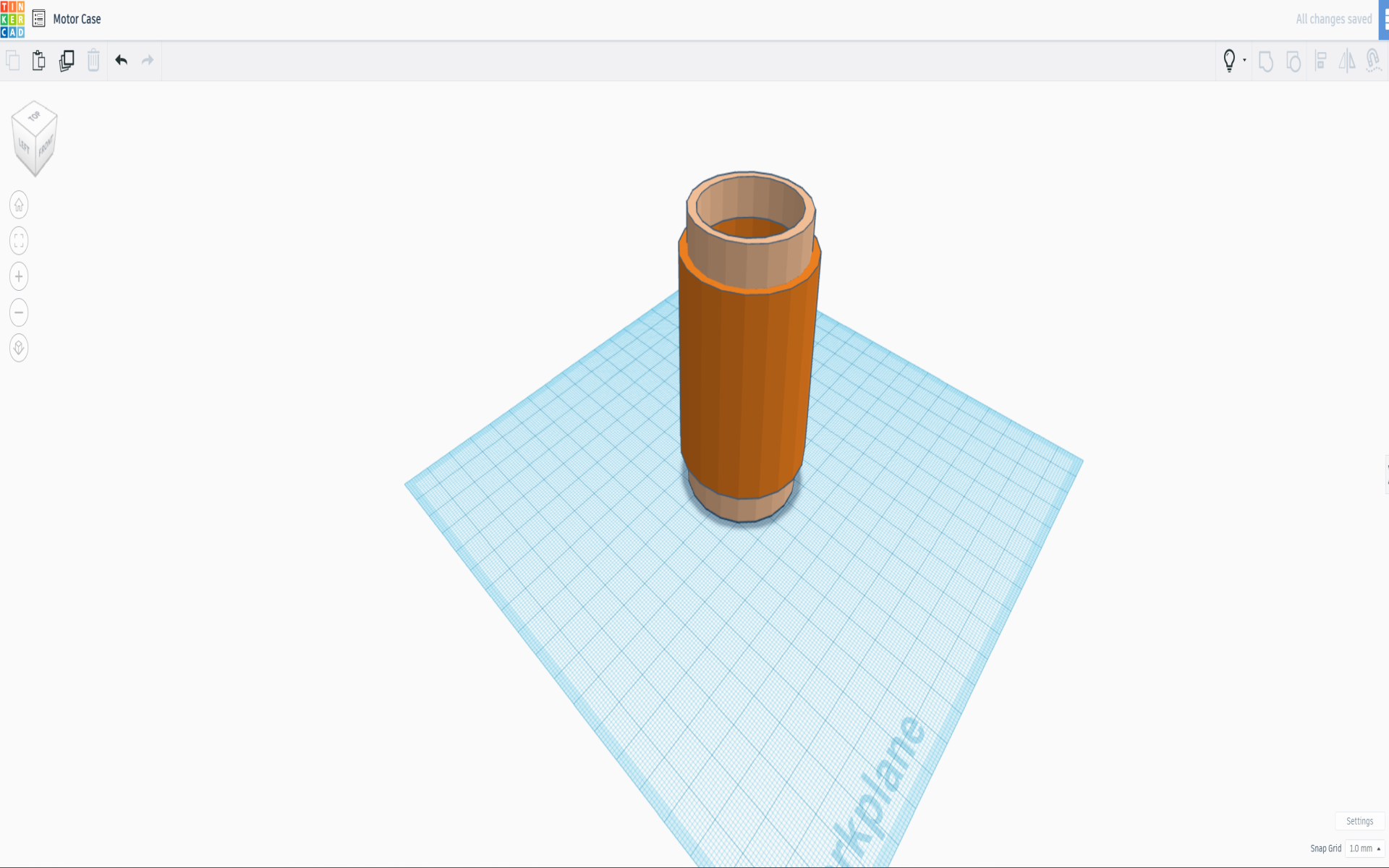
Work has started on 3d modeling the motor casing for the robot. Progress can be seen in the image below.
Goals
The main goals for next week are to bring the 3d modeling for the motor casing closer to completion. It would be great to have our first test prints by next stream, or the latest being the stream after next. I would also like to get the Jetson Nano image completed by next stream so that testing of the 3d models can begin. Ideally, we will need to monitor memory, and overall resource usage on the jetson with all 3 models running at once. This way if any resource problems arise we can start to plan for them early on!
That's it for this week. Make sure to check out my stream on Twitch every Saturday at 1pm - 5pm, or follow me on Twitter for more updates as the build progresses!